
Publications
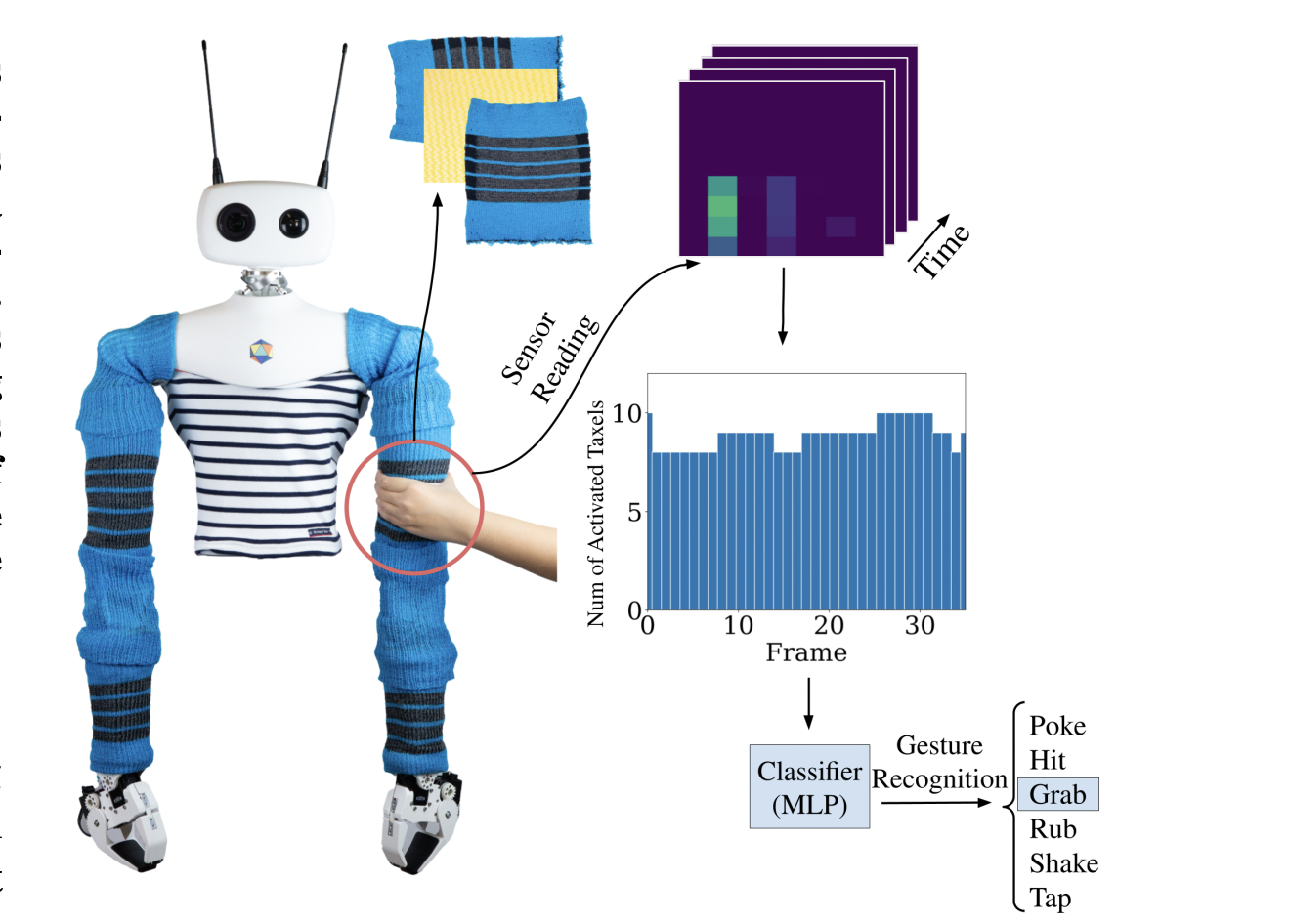
Social Gesture Recognition in spHRI: Leveraging Fabric-Based Tactile Sensing on Humanoid Robots
Dakarai Crowder, Kojo VanDyck, Xiping Sun, James McCann and Wenzhen Yuan
IEEE International Conference on Robotics and Automation (ICRA), 2025
[Paper] | [Website]
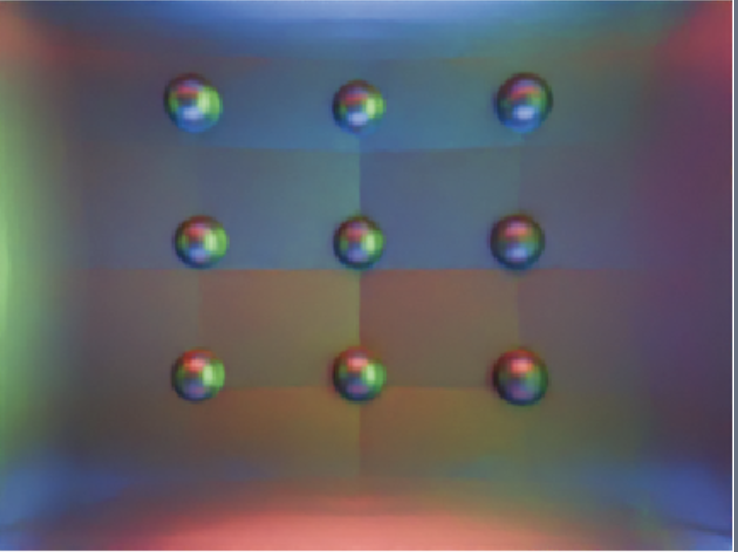
A modularized design approach for GelSight family of vision-based tactile sensors
Arpit Agarwal *, Mohammad Amin Mirzaee *, Xiping Sun, and Wenzhen Yuan
The International Journal of Robotics Research, 2025
[Paper]